

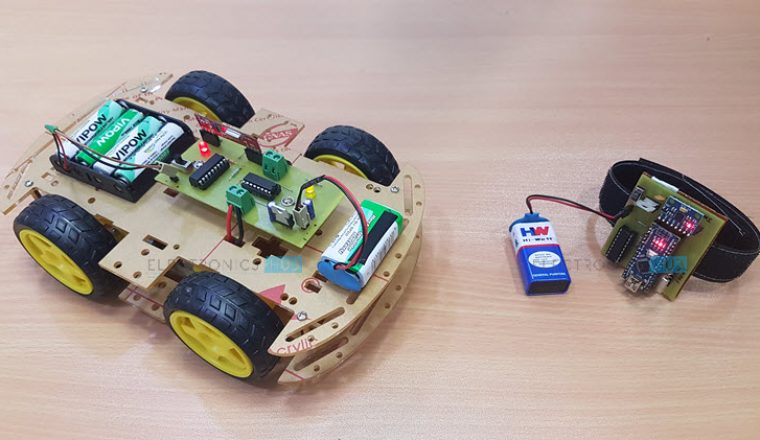
Dalam proyek ini, kami telah merancang Robot Kontrol Gerakan Tangan sederhana menggunakan Arduino. Robot Kontrol Gerakan Tangan ini didasarkan pada Arduino Nano, MPU6050, Pasangan Penerima-Pemancar RF dan Pengemudi Motor L293.
Meskipun judulnya dikatakan sebagai Hand Gestured Controlled Robot, secara teknis robot ini dikendalikan oleh kemiringan tangan.
Kata pengantar
Robot adalah sistem elektro-mekanis yang dioperasikan oleh program komputer. Robot dapat bersifat otonom atau semi-otonom. Robot otonom tidak dikendalikan oleh manusia dan bertindak atas keputusannya sendiri dengan merasakan lingkungannya.
Mayoritas robot industri bersifat otonom karena mereka diharuskan untuk beroperasi dengan kecepatan tinggi dan dengan akurasi tinggi. Tetapi beberapa aplikasi memerlukan robot semi-otonom atau dikendalikan manusia.
Beberapa sistem kontrol yang paling umum digunakan adalah pengenalan suara, kontrol sentuhan atau sentuhan dan kontrol gerak.
Salah satu robot yang dikendalikan gerak yang sering diimplementasikan adalah Robot Kontrol Gerakan Tangan. Dalam proyek ini, sebuah robot yang dikendalikan gerakan tangan dikembangkan menggunakan MPU6050, yang merupakan Accelerometer 3-sumbu dan sensor Giroskop 3-sumbu dan bagian pengontrolnya adalah Arduino Nano.
Alih-alih menggunakan remote control dengan tombol atau joystick, gerakan tangan digunakan untuk mengontrol gerakan robot.
Proyek ini didasarkan pada komunikasi nirkabel, di mana data dari isyarat tangan ditransmisikan ke robot melalui tautan RF (RF Transmitter - Receiver pair).
Proyek ini dibagi menjadi bagian pemancar dan penerima. Diagram sirkuit dan komponen dijelaskan secara terpisah untuk bagian pengirim dan penerima.


Untuk memahami prinsip pengoperasian Robot Tangan Terkendali Tangan, mari kita bagi proyek menjadi tiga bagian.
Bagian pertama adalah mendapatkan data dari MPU6050 Accelerometer Gyro Sensor oleh Arduino. Arduino terus menerus memperoleh data dari MPU6050 dan berdasarkan pada parameter yang telah ditentukan, ia mengirimkan data ke Pemancar RF.
Bagian kedua dari proyek ini adalah Komunikasi Nirkabel antara Pemancar RF dan Penerima RF. Pemancar RF, setelah menerima data dari Arduino (melalui IC Encoder), mentransmisikannya melalui Komunikasi RF ke Penerima RF.
Akhirnya, bagian ketiga dari proyek ini adalah mendekode data yang diterima oleh Penerima RF dan mengirimkan sinyal yang sesuai ke IC Driver Motor, yang akan mengaktifkan Roda Motor Robot.
Blok Diagram Robot Kontrol Gerakan Tangan
Gambar-gambar berikut menunjukkan diagram blok sederhana dari Robot Kontrol Gerakan Tangan untuk Bagian Transmitter dan Receiver.
Diagram Blok Pemancar
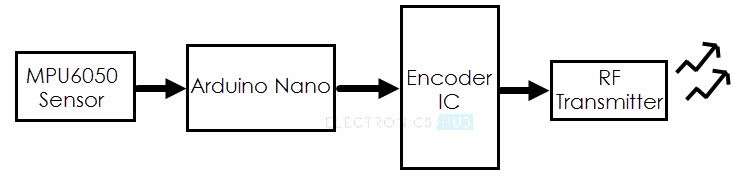
Diagram Blok Penerima
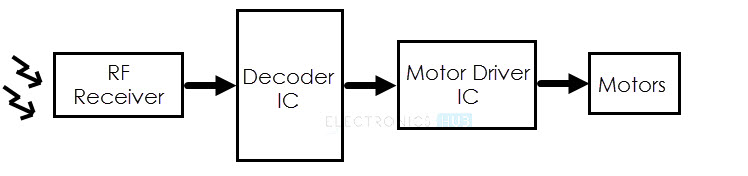
Diagram Sirkuit dari Bagian Pemancar
Gambar berikut ini menunjukkan diagram sirkuit bagian Transmitter dari proyek Robot Hand Gesture Controlled.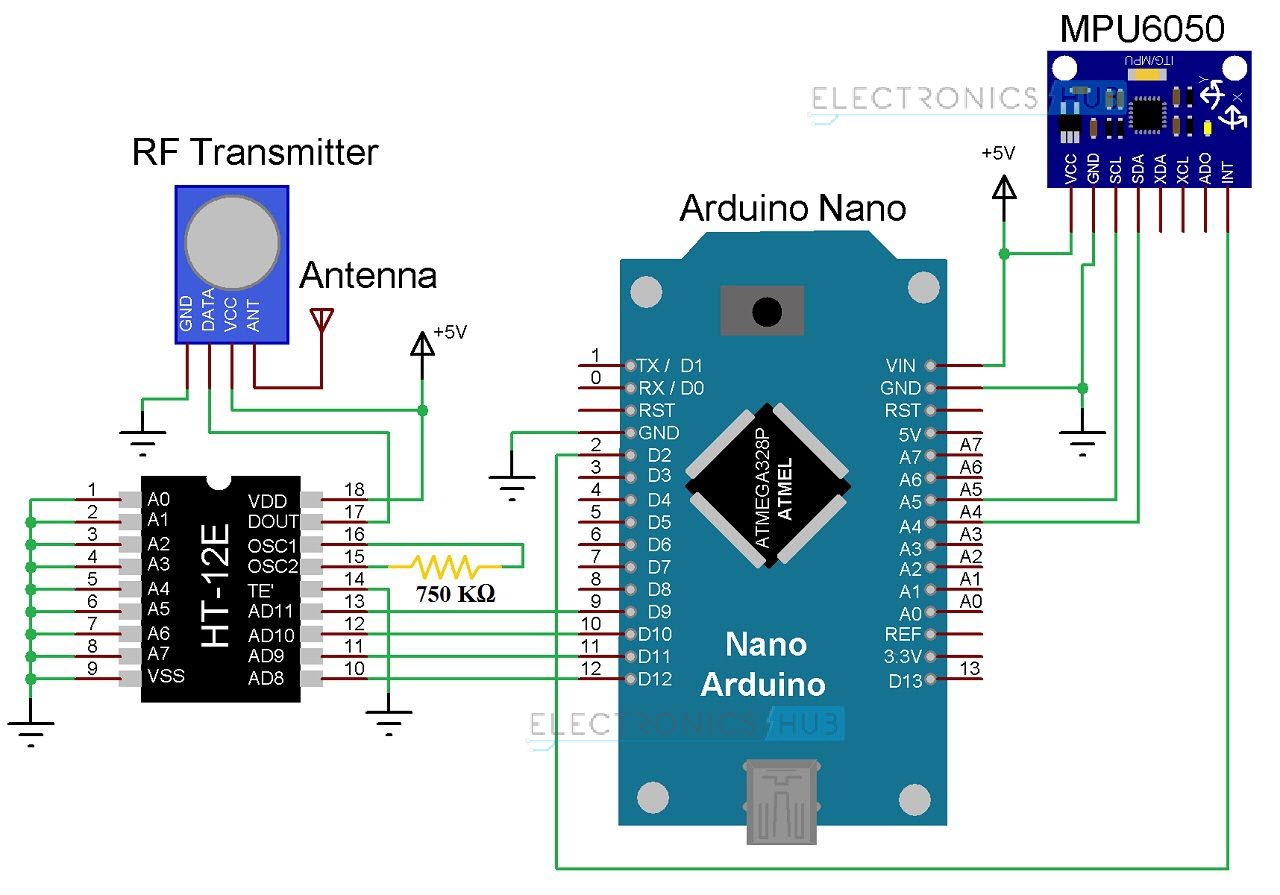
Komponen untuk Bagian Pemancar
- Arduino Nano
- 434MHz RF Transmitter
- HT-12E Encoder IC
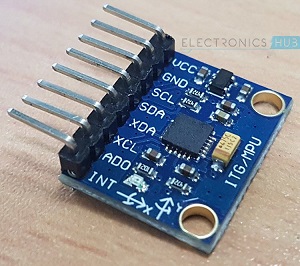
- Sensor MPU6050 Accelerometer / Giroskop
- 750KΩ Resistor
Diagram Sirkuit dari Bagian Penerima
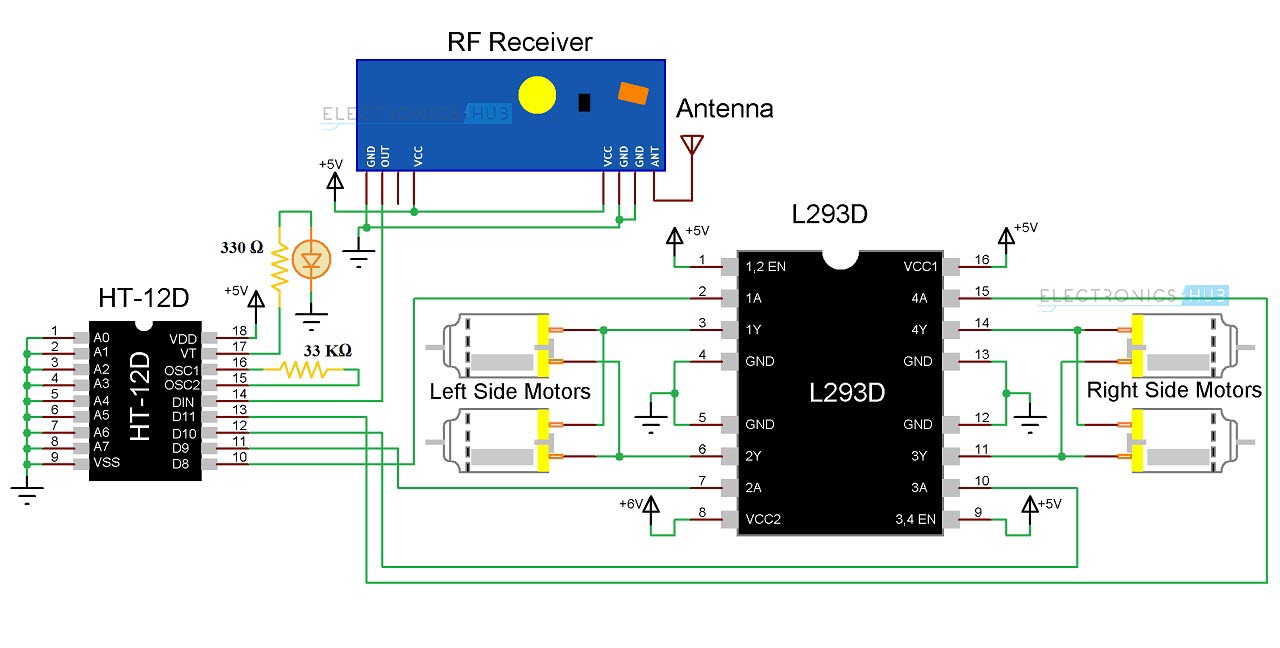
Komponen untuk Bagian Penerima
- L293D IC Driver Motor
- HT-12D Decoder IC
- 434 MHz Penerima RF
- 33KΩ Resistor
- 330Ω Resistor
- LED
- 4 Motor Gear dengan Roda
- Robot Chassis
Deskripsi komponen
MPU6050
The MPU6050 adalah salah satu Modul Sensor yang paling umum digunakan oleh penggemar dan penggemar. Ini terdiri dari Accelerometer dan Giroskop pada IC yang sama dan memberikan 6 Derajat Kebebasan (3-akselerometer dan 3-sumbu Giroskop).
Modul Pemancar dan Penerima RF
Komunikasi antara pemancar dan penerima menggunakan modul RF. Pasangan pemancar dan penerima 434 MHz digunakan dalam proyek ini.
HT-12E
Ini adalah IC enkoder yang mengubah data paralel 4-bit menjadi data serial untuk mengirim melalui tautan RF.
HT-12D
Ini adalah IC decoder yang mengubah data serial yang diterima oleh Penerima RF menjadi data paralel 4-bit. Data paralel ini dapat digunakan untuk menggerakkan motor.
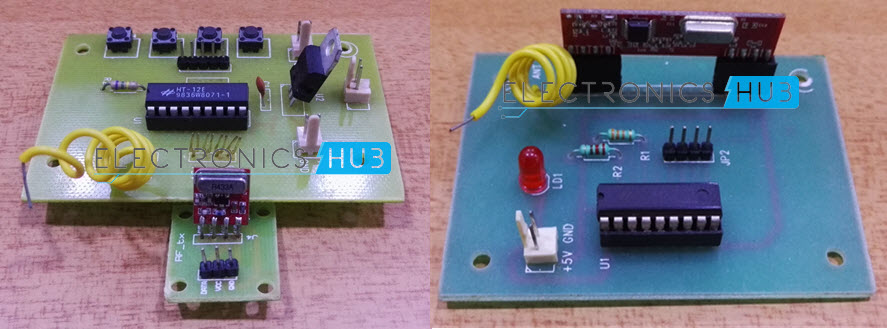
Desain Sirkuit Robot Kontrol Gerakan Tangan
Bagian Pemancar
Bagian pemancar robot terdiri dari papan Arduino Nano, Sensor MPU6050, IC Encoder HT-12E dan Pemancar RF. Komunikasi antara Arduino dan MPU6050 Sensor berlangsung melalui I2C Interface. Oleh karena itu, pin SCL dan SDA pada Sensor MPU6050 terhubung ke pin A5 dan A4 Arduino Nano.
Selain itu, kami akan menggunakan pin interupsi MPU6050 dan karenanya, terhubung ke D2 dari Arduino Nano.
HT-12E adalah IC encoder yang sering dikaitkan dengan modul RF Transmitter. Ini mengubah data paralel 12-bit menjadi data serial. Data 12-bit dibagi menjadi bit alamat dan data. A0 ke A7 (Pin 1 ke Pin8) adalah bit alamat dan mereka digunakan untuk transmisi data yang aman. Pin ini dapat dibiarkan terbuka atau terhubung ke ground (Vss). Di sirkuit ini, Pin 1 ke Pin 9 (A0 - A7 dan Vss) dari HT-12E terhubung ke ground.
Pin 10 hingga 13 (AD8, AD9, AD10, dan AD11) adalah pin data HT-12E. Mereka menerima data paralel 4 kata dari sumber eksternal seperti mikrokontroler (Arduino Nano dalam kasus ini). Mereka terhubung ke pin D12, D11, D10 dan D9 dari Arduino Nano masing-masing.
TE 'adalah pin aktifkan transmisi dan pin rendah aktif. Data ditransmisikan selama TE 'rendah. Karenanya, Pin 14 (TE ') juga terhubung ke ground.
IC enkoder memiliki sirkuit osilator internal antara pin 16 dan 15 (OSC1 dan OSC2). Sebuah resistor 750KΩ terhubung di antara pin-pin ini untuk mengaktifkan osilator. Dout (Pin 17) adalah pin data out out. Terhubung ke data dalam pin Pemancar RF.
Arduino Nano dan MPU6050 memiliki Regulator 3.3V. Oleh karena itu, semua pin VCC terhubung ke Pasokan 5V yang diatur.
Bagian Penerima
Bagian penerima robot terdiri dari Penerima RF, IC Dekoder HT-12D, IC Driver Motor L293D dan sasis robot dengan empat motor yang terhubung ke roda.
HT-12D adalah IC decoder yang sering dikaitkan dengan RF Receiver. Ini mengubah data serial yang diterima oleh tautan RF menjadi data paralel. A0 hingga A7 (Pin 1 hingga Pin 8) adalah pin alamat dan harus dicocokkan dengan pin alamat encoder.
Karena pin alamat encoder (HT-12E) di-ground, pin alamat decoder juga harus di-ground. Oleh karena itu, pin 1 hingga 9 (A0 - A7 dan Vss) terhubung ke ground. Data serial dari Penerima RF diberikan kepada Din (Pin 14) dari IC decoder.
HT-12D memiliki osilator internal dan resistor eksternal 33KΩ terhubung antara OSC1 dan OSC2 (Pin 16 dan 15). Pin 17 (VT) menunjukkan transmisi data yang valid dan pin ini akan tinggi ketika data yang valid ada pada pin data. LED seri dengan resistor 330Ω terhubung ke pin ini untuk menunjukkan transmisi data yang valid.
Pin 10 hingga 13 (D8, D9, D10 dan D11) dari HT-12D adalah pin paralel data out. Mereka terhubung ke pin input IC driver motor L293D (masing-masing Pin 2, 7, 10 dan 15).
L293D driver motor IC digunakan untuk menyediakan arus yang diperlukan (untuk arah maju dan mundur) ke motor. Pin 1 dan 9 adalah pin aktif dan terhubung ke VCC (+ 5v) bersama dengan Pin 16 (yang merupakan pasokan logika). Pin 3 - 6 dan 11 - 14 adalah output dan terhubung ke empat motor.
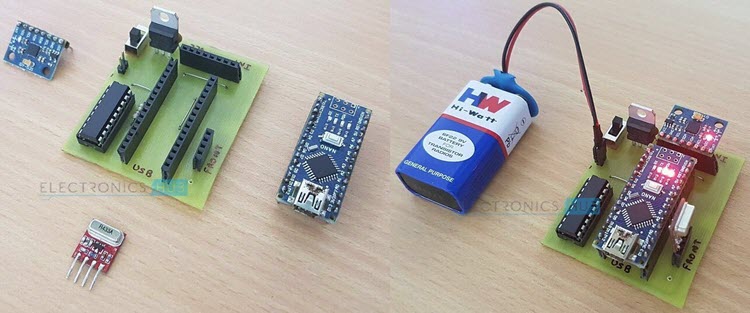
Pin 8 adalah Pin Suplai Motor dan terhubung ke catu daya terpisah. Karenanya, Anda akan memerlukan dua baterai di Bagian Penerima; satu untuk Sirkuit dan satu untuk motor.
Bekerja dari Robot Kontrol Gerakan Tangan
Dalam proyek ini, sebuah robot mobile yang dikendalikan oleh gerakan yang dibuat oleh tangan, dirancang. Cara kerja robot dijelaskan di sini.
Seperti yang disebutkan sebelumnya, robot yang dikendalikan oleh gesture adalah robot yang dioperasikan secara nirkabel dan memiliki dua bagian: Pemancar dan Penerima. Ketika robot dinyalakan, bagian pemancar, yang terdiri dari Arduino, MPU6050, Encoder dan RF Transmitter, akan terus memonitor sensor MPU6050.
Data ini ditangkap oleh Arduino, yang kemudian mentransmisikan data yang sesuai ke Encoder, berdasarkan orientasi Sensor MPU6050. Data paralel yang diterima oleh encoder dikonversi menjadi data serial dan data serial ini ditransmisikan oleh Pemancar RF.
Pada bagian penerima, Penerima RF menerima data serial dan mengirimkannya ke IC Decoder. Decoder akan mengubah data serial menjadi data paralel dan data paralel ini diberikan kepada IC driver motor. Berdasarkan data, pergerakan motor, dan karenanya pergerakan robot didefinisikan.
Aplikasi
- Robot yang dikendalikan nirkabel sangat berguna dalam banyak aplikasi seperti pengawasan jarak jauh, militer, dll.
- Robot yang dikendalikan dengan gesture tangan dapat digunakan secara fisik di kursi roda.
- Gerakan tangan yang dikendalikan oleh lengan robot tingkat industri dapat dikembangkan.
Sejauh ini Anda mengetahui Robot Kontrol Gerakan Tangan yang sepenuhnya bergerak sesuai dengan momen tangan Anda (tanda input ke perangkat). Jika Anda mencari perangkat anggaran rendah yang serupa maka penyedot debu Robot paling cocok untuk Anda karena memiliki fungsi yang lebih besar dalam membersihkan rumah Anda.
Robot Kontrol Gerakan Tangan Sederhana Menggunakan Arduino
 Reviewed by MCH
on
December 26, 2019
Rating:
Reviewed by MCH
on
December 26, 2019
Rating:
Reviewed by MCH
on
December 26, 2019
Rating:





No comments: